
卡爾曼濾波器是1種利用線性系統(tǒng)狀態(tài)方程,通過(guò)系統(tǒng)輸入輸出觀測(cè)數(shù)據(jù),對(duì)系統(tǒng)狀態(tài)進(jìn)行最優(yōu)估計(jì)的算法。而且由于觀測(cè)包括系統(tǒng)的噪聲和干擾的影響,所以最優(yōu)估計(jì)也可看作是濾波進(jìn)程。
卡爾曼濾波器的核心內(nèi)容就是5條公式,計(jì)算簡(jiǎn)單快速,合適用于少許數(shù)據(jù)的預(yù)測(cè)和估計(jì)。
下面我們用1個(gè)例子來(lái)講明1下卡爾曼算法的利用。
假定我們想在有1輛小車,在 t 時(shí)刻其速度為 Vt ,位置坐標(biāo)為 Pt,ut 表示 t 時(shí)刻的加速度,那末我們可以用Xt表示 t 時(shí)刻的狀態(tài),以下:
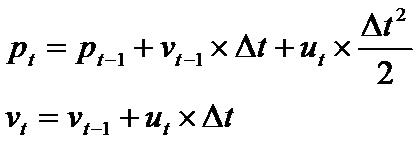
則我們可以得到,由t⑴ 時(shí)刻到 t 時(shí)刻,位置和速度的轉(zhuǎn)換以下:
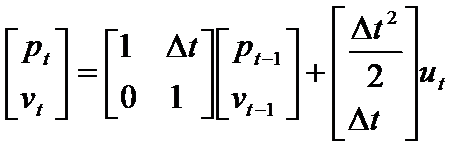
用向量表示上述轉(zhuǎn)換進(jìn)程,以下:
以下圖:
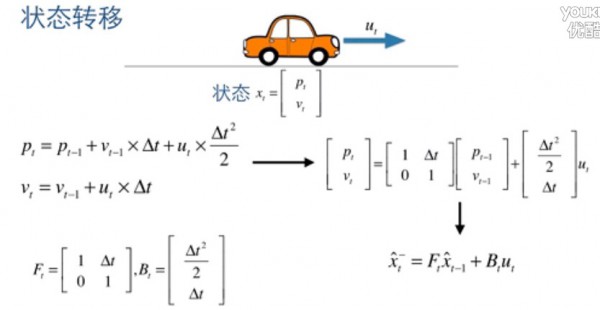
那末我們可以得到以下的狀態(tài)轉(zhuǎn)移公式:
其中矩陣 F 為狀態(tài)轉(zhuǎn)移矩陣,表示如何從上1狀態(tài)來(lái)推測(cè)當(dāng)前時(shí)刻的狀態(tài),B 為控制矩陣,表示控制量u如何作用于當(dāng)前矩陣,上面的公式 x 有頂帽子,表示只是估計(jì)值,其實(shí)不是最優(yōu)的。
有了狀態(tài)轉(zhuǎn)移公式就能夠用來(lái)推測(cè)當(dāng)前的狀態(tài),但是所有的推測(cè)都是包括噪聲的,噪聲越大,不肯定越大,協(xié)方差矩陣用來(lái)表示這次推測(cè)帶來(lái)的不肯定性
假定我們有1個(gè)1維的數(shù)據(jù),這個(gè)數(shù)據(jù)每次丈量都不同,我們假定服從高斯散布,那末我們可以用均值和方差來(lái)表示該數(shù)據(jù)集,我們將該1維數(shù)據(jù)集投影到坐標(biāo)軸上,以下圖:
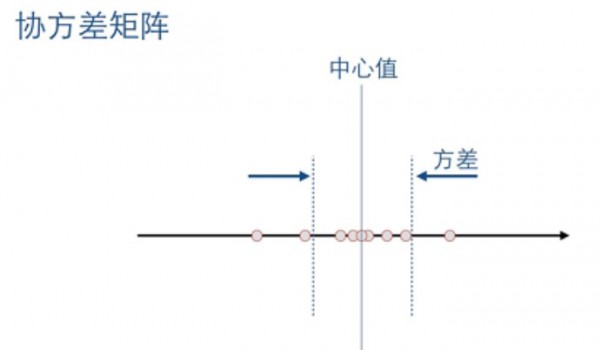
可以看到,服從高斯散布的1維數(shù)據(jù)大部份散布在均值附近。
現(xiàn)在我們來(lái)看看服從高斯散布的2維數(shù)據(jù)投影到坐標(biāo)軸的情況,以下圖:
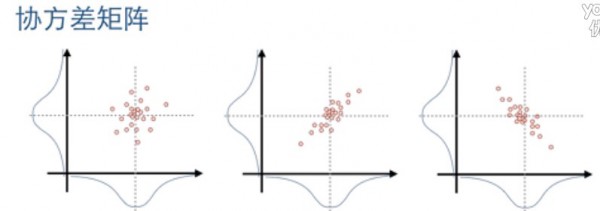
2維數(shù)據(jù)比1維數(shù)據(jù)略微復(fù)雜1點(diǎn),投影后有3種情況,分別是:
左圖:兩個(gè)維的數(shù)據(jù)互不相干;
中圖:兩個(gè)維的數(shù)據(jù)正相干,也就是 y 隨著 x 的增大而增大(假定兩個(gè)維分別為 x 和 y)
右圖:兩個(gè)維的數(shù)據(jù)負(fù)相干,也就是 y 隨著 x 的增大而減小。
那怎樣來(lái)表示兩個(gè)維的數(shù)據(jù)的相干性呢?答案就是協(xié)方差矩陣。
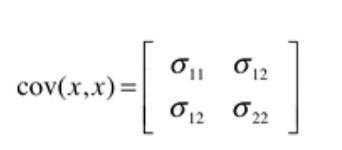

在公式(1)當(dāng)中,我們已得到了狀態(tài)的轉(zhuǎn)移公式,但是由上面可知,2維數(shù)據(jù)的協(xié)方差矩陣對(duì)描寫數(shù)據(jù)的特點(diǎn)是很重要的,那末我們應(yīng)當(dāng)如何更新或說(shuō)傳遞我們的2維數(shù)據(jù)的協(xié)方差矩陣呢?假設(shè)我們用 P 來(lái)表示狀態(tài)協(xié)方差,即
那末加入狀態(tài)轉(zhuǎn)換矩陣 F ,得到
也即:
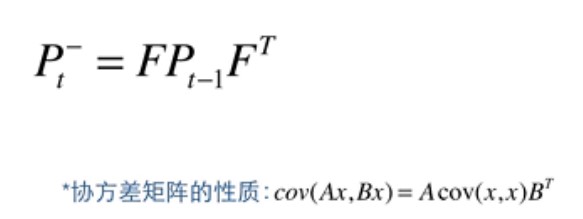
因此我們便得到了協(xié)方差的轉(zhuǎn)換公式。
現(xiàn)在我們得到了兩個(gè)公式,應(yīng)用這兩個(gè)公式能夠?qū)ΜF(xiàn)在狀態(tài)進(jìn)行預(yù)測(cè)。依照我們的正常思路來(lái)理解,預(yù)測(cè)結(jié)果不1定會(huì)對(duì)嘛,肯定有誤差。而且在我們大多數(shù)回歸算法或是擬合算法中,1般思路都是先預(yù)測(cè),然后看看這個(gè)預(yù)測(cè)結(jié)果跟實(shí)際結(jié)果的誤差有多大,再根據(jù)這個(gè)誤差來(lái)調(diào)劑預(yù)測(cè)函數(shù)的參數(shù),不斷迭代調(diào)劑參數(shù)直到預(yù)測(cè)誤差小于1定的閾值。
卡爾曼算法的迭代思想也類似,不過(guò)這里根據(jù)誤差調(diào)劑的是狀態(tài) X 。
在這里,我們的實(shí)際數(shù)據(jù)就是 Z, 以下圖:
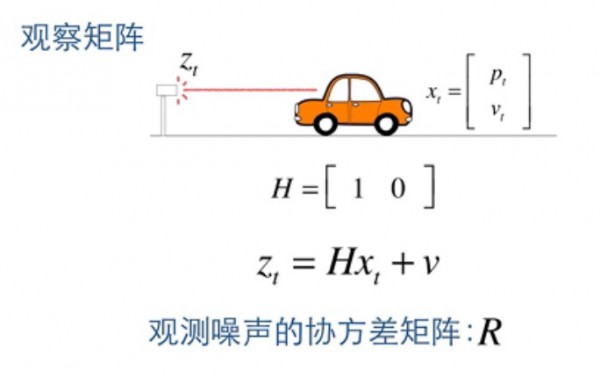
其中,矩陣 H 為丈量系統(tǒng)的參數(shù),即視察矩陣,v 為觀測(cè)噪聲, 其協(xié)方差矩陣為R
那末我們的狀態(tài)更新公式以下:
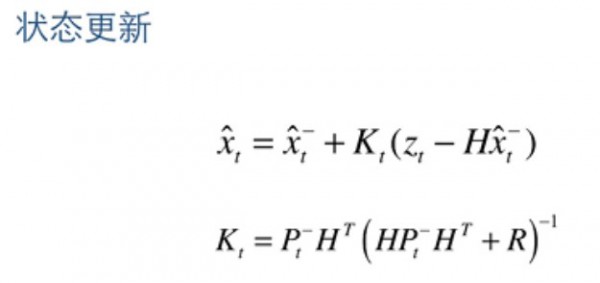
其中K 為卡爾曼系數(shù), Z-Hx 則為殘差,也就是我們說(shuō)的,預(yù)測(cè)值與實(shí)際值的誤差。
K的作用:
1.K 權(quán)衡預(yù)測(cè)協(xié)方差P和視察協(xié)方差矩陣R那個(gè)更加重要,相信預(yù)測(cè),殘差的權(quán)重小,相信視察,殘差權(quán)重大,由 K 的表達(dá)是可以退出這個(gè)結(jié)論
2,將殘差的表現(xiàn)情勢(shì)從視察域轉(zhuǎn)換到狀態(tài)域(殘差與1個(gè)標(biāo)量,通過(guò)K 轉(zhuǎn)換為向量),由 狀態(tài) X 的更新公式可得到該結(jié)論。
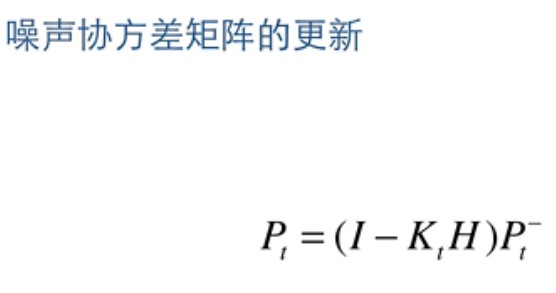
至此,我們已得到了 t 狀態(tài)下的最優(yōu)估計(jì)值 Xt。但為了能讓我們的迭代算法延續(xù)下去,我們還必須更新狀態(tài)協(xié)方差的值。
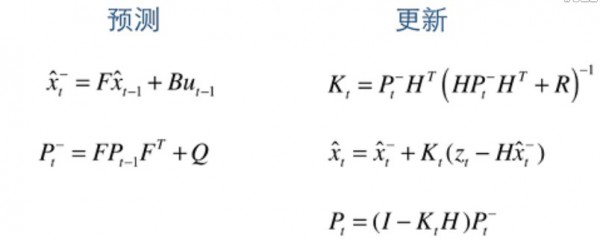
以上就是卡爾曼濾波算法的思想,只有簡(jiǎn)單的 5 條公式,總結(jié)以下:
function kalmanFiltering
%%
clc
close all
%%
%
% Description : kalmanFiltering
% Author : Liulongpo
% Time:2015⑷⑵9 16:42:34
%
%%
Z=(1:2:200); %觀測(cè)值 汽車的位置 也就是我們要修改的量
noise=randn(1,100); %方差為1的高斯噪聲
Z=Z+noise;
X=[0 ; 0 ]; %初始狀態(tài)
P=[1 0;0 1]; %狀態(tài)協(xié)方差矩陣
F=[1 1;0 1]; %狀態(tài)轉(zhuǎn)移矩陣
Q=[0.0001,0;0 , 0.0001]; %狀態(tài)轉(zhuǎn)移協(xié)方差矩陣
H=[1,0]; %觀測(cè)矩陣
R=1; %觀測(cè)噪聲方差
figure;
hold on;
for i = 1:100
%基于上1狀態(tài)預(yù)測(cè)當(dāng)前狀態(tài)
X_ = F*X;
% 更新協(xié)方差 Q系統(tǒng)進(jìn)程的協(xié)方差 這兩個(gè)公式是對(duì)系統(tǒng)的預(yù)測(cè)
P_ = F*P*F'+Q;
% 計(jì)算卡爾曼增益
K = P_*H'/(H*P_*H'+R);
% 得到當(dāng)前狀態(tài)的最優(yōu)化估算值 增益乘以殘差
X = X_+K*(Z(i)-H*X_);
%更新K狀態(tài)的協(xié)方差
P = (eye(2)-K*H)*P_;
scatter(X(1), X(2),4); %畫點(diǎn),橫軸表示位置,縱軸表示速度
end
end
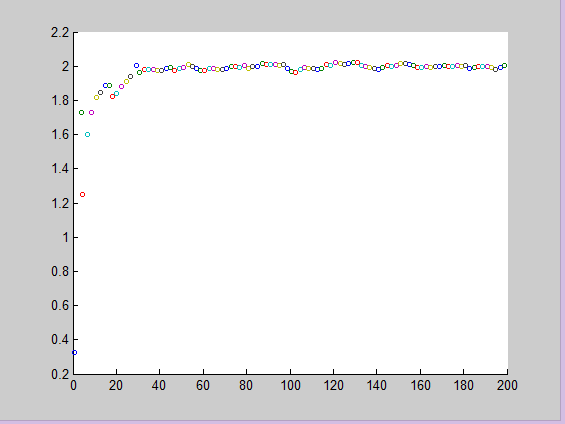
其中 x 軸為位置,y軸為速度。
在代碼中,我們?cè)O(shè)定x的變化是 1:2:200,則速度就是2,可以由上圖看到,值經(jīng)過(guò)幾次迭代,速度就基本上在 2 附近擺動(dòng),擺動(dòng)的緣由是我們加入了噪聲。
接下來(lái)來(lái)看1個(gè)實(shí)際例子。
我們的數(shù)據(jù)為 data = [149.360 , 150.06, 151.44, 152.81,154.19 ,157.72];
這是應(yīng)用光流法從視頻中獲得角點(diǎn)的實(shí)際x軸坐標(biāo),總共有6個(gè)數(shù)據(jù),也就是代表了1個(gè)點(diǎn)的連續(xù)6幀的x軸坐標(biāo)。接下來(lái)這個(gè)例子,我們將實(shí)現(xiàn)用5幀的數(shù)據(jù)進(jìn)行訓(xùn)練,然后預(yù)測(cè)出第6幀的x軸坐標(biāo)。
在上1個(gè)matlab例子中,我們的訓(xùn)練數(shù)據(jù)比較多,因此我們的初始狀態(tài)設(shè)置為[0,0],也就是位置為0,速度為0,在訓(xùn)練數(shù)據(jù)比較多的情況下,初始化數(shù)據(jù)為0并沒(méi)有關(guān)系,由于我們?cè)谏厦娴男Ч麍D中可以看到,算法的經(jīng)太短暫的迭代就可以夠發(fā)揮作用。
但在這里,我們的訓(xùn)練數(shù)據(jù)只有5幀,所以為了加快訓(xùn)練,我們將位置狀態(tài)初始化為第1幀的位置,速度初始化為第2幀與第1幀之差。
KF.m
function [predData,dataX] = KF(dataZ)
%%
%
% Description : kalmanFiltering
% Author : Liulongpo
% Time:2015⑷⑵9 16:42:34
%
%%
Z = dataZ';
len = length(Z);
%Z=(1:2:200); %觀測(cè)值 汽車的位置 也就是我們要修改的量
noise=randn(1,len); %方差為1的高斯噪聲
dataX = zeros(2,len);
Z=Z+noise;
X=[Z(1) ; Z(2)-Z(1) ]; %初始狀態(tài) 分別為 位置 和速度
P=[1 0;0 1]; %狀態(tài)協(xié)方差矩陣
F=[1 1;0 1]; %狀態(tài)轉(zhuǎn)移矩陣
Q=[0.0001,0;0 , 0.0001]; %狀態(tài)轉(zhuǎn)移協(xié)方差矩陣
H=[1,0]; %觀測(cè)矩陣
R=1; %觀測(cè)噪聲方差
%figure;
%hold on;
for i = 1:len
%基于上1狀態(tài)預(yù)測(cè)當(dāng)前狀態(tài)
% 2x1 2x1
X_ = F*X;
% 更新協(xié)方差 Q系統(tǒng)進(jìn)程的協(xié)方差 這兩個(gè)公式是對(duì)系統(tǒng)的預(yù)測(cè)
% 2x1 2x1 1x2 2x2
P_ = F*P*F'+Q;
% 計(jì)算卡爾曼增益
K = P_*H'/(H*P_*H'+R);
% 得到當(dāng)前狀態(tài)的最優(yōu)化估算值 增益乘以殘差
X = X_+K*(Z(i)-H*X_);
%更新K狀態(tài)的協(xié)方差
P = (eye(2)-K*H)*P_;
dataX(:,i) = [X(1);X(2)];
%scatter(X(1), X(2),4); %畫點(diǎn),橫軸表示位置,縱軸表示速度
end
predData = F*X;
endtestKF.m
function testKF
%%
clc
close all
%%
%data = load('D:a.txt');
%data = [149.360 , 150.06, 151.44, 152.81,154.19,157.72,157.47,159.33,153.66];
data = [149.360 , 150.06, 151.44, 152.81,154.19 ,157.72];
[predData , DataX] = KF(data');
error = DataX(1,:) - data;
i = 1:length(data);
figure
subplot 311
scatter(i,data,3),title('原始數(shù)據(jù)')
subplot 312
scatter(i,DataX(1,:),3),title('預(yù)測(cè)數(shù)據(jù)')
subplot 313
scatter(i,error,3),title('預(yù)測(cè)誤差')
predData(1)
%{
scatter(i,error,3);
figure
scatter(i,data,3)
figure
scatter(i,predData(1,:),3)
%}
end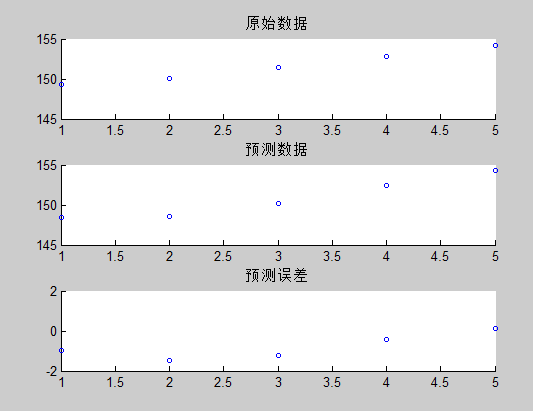
預(yù)測(cè)結(jié)果為: 155.7493 ,跟實(shí)際結(jié)果 157.72 唯一1.9 的誤差,可以看到,卡爾曼濾波器算法對(duì)少許數(shù)據(jù)的預(yù)測(cè)效果還是挺不錯(cuò)的。固然,預(yù)測(cè)位置的同時(shí),我們也得到了預(yù)測(cè)速度。
參考文獻(xiàn): 視頻: 卡爾曼濾波的原理和在MATLAB中的實(shí)現(xiàn)
程序員人生,我編程,我富裕,記住wfuyu網(wǎng),php教程,php學(xué)習(xí),php手冊(cè),CMS模版制作
聲明:本站大部分內(nèi)容是作者原創(chuàng),少部分收集于互聯(lián)網(wǎng)供大家一起學(xué)習(xí),原版權(quán)很多不明,如有侵權(quán)請(qǐng)聯(lián)系本站,謝謝!
粵ICP備14040726號(hào)-1?? 2015-2020 程序員人生 版權(quán)所有


