
7月19日 - 20日高德攜手CSDN共同舉辦的“高德LBS智能硬件編程馬拉松”在深圳3W咖啡成功舉辦。本次大賽得到了土曼、凌拓科技、億航的硬件支持,并邀請到了來自高德、Seeed Studio和Mixtile的嘉賓共同參與評選。經過兩天一夜的持續奮戰,云雀科技脫穎而出,斬獲大賽一等獎。他們不僅分享了開發過程,還聊起了對于地圖與飛行器可結合的發展方向。

云雀科技
云雀科技展示的作品是基于四軸飛行器的硬件平臺,最與眾不同之處就是他們開發了一款支持全彩顯示的遙控器。遙控器基于Android系統,可以實時接收飛行器拍攝到的視頻數據,以及航點、高度、速度等信息。經過兩天的開發,他們將高德開放平臺的API集成到了遙控器中,可以實時跟蹤飛行器的位置,并顯示一些航行信息。同時,飛行器在飛行過程中,還能將航點數據上傳并保存在手持終端里,利用高德云圖服務,用戶可以隨時在平板或云圖平臺上看到飛行的航點數據,甚至進行分享。
高德地圖Android API+高德云圖
他們的作品用到了兩項高德LBS開放平臺的產品:Android API和云圖。Android API為這款產品提供了GPS定位、自定義導航界面等信息資源,讓產品具備定位飛行器,實時獲取位置信息的能力。目前全彩可視遙控器上已經顯示出包括速度、高度、GPS信息、經緯度,還有飛機在飛行過程中所處的位置、航向角度等數據。

飛行器與全彩可視遙控器
從這款設備本身來講,它有兩大特點:一是集成了全彩的HUD顯示,二是支持最遠達10公里的遠程遙控。其實,云雀科技本身是FPV飛行器解決方案供應商,目前可以提供包含視頻疊加(OSD)系統、自動天線跟蹤、飛行姿態與控制、高精度抗干擾GPS等十余款產品,遙控器只是其中一款。他們在與一些客戶的接觸過程中發現,大多數客戶都提出了實時航點和軌跡數據的需求。而云圖對于這款產品來說,就是一個最合適的解決方案。

飛行器在航行過程中,會講航點數據從飛行器實時傳輸到遙控器上,當飛行結束后,遙控器可以將數據上傳至高德云圖,從而達到實時共享飛行航點信息的目的。同時,利用云圖的數據展示能力,渲染后還能進行位置信息的展示。如下圖所示,云雀科技在比賽期間,進行了測試,通過模擬GPS采集了大約1200個航點數據,在上傳至云圖后,完整地展示了出來。
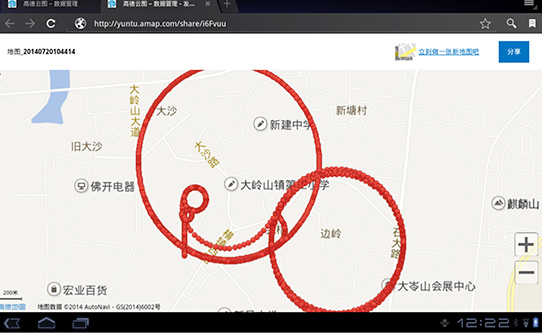
在云圖中所顯示的飛行軌跡
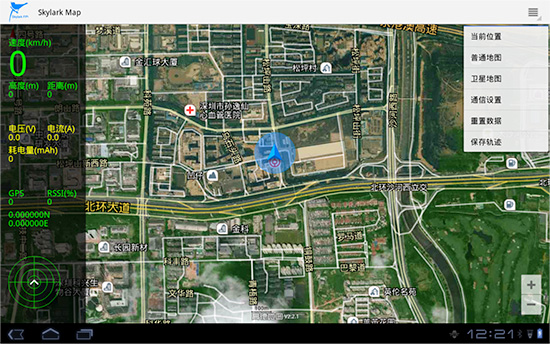
基于高德地圖API的應用界面
賽后,云雀科技參賽成員田文生表示,高德地圖AndroidAPI已經非常成熟,不過云圖還是個比較新的產品。但他們在使用過程中發現,對于較大的航點數據來說,上傳速度還不夠理想。
未來展望
云雀科技從飛行器領域,他們認為無人機與LBS應用的結合是非常符合市場需求的。首先使用者需要看到飛行器實時的飛行位置,這就需要地圖與之結合。另一方面,如果從“無人機”的名字來考慮,它本身就應該要達到無人操控,所以就產生了“航線規劃”和“航機設置”的功能需求,而這兩點也都是無法脫離于地圖存在的。
云雀科技除了研發飛行器、遠程遙控系統等,他們還為一些客戶提供航拍服務。他們表示,現在考慮最多的方案就是將航拍與地圖的結合。
眾所周知,現在很多地圖都支持3D街景功能,如果將航拍與3D街景結合會是怎樣一番景象呢?想象一下,當你走到一個景點,打開地圖,你可以看到3D的街景圖像,同時還可以瀏覽由飛行器實時航拍的視頻,你所能了解到的不再是簡單的圖像信息,而是更加生動的景象。再想象一下,當你看航拍視頻時,還可以同時在視頻窗口旁看到飛行器的運動軌跡,可以清楚的了解到正在看的實時視頻是在什么位置拍攝的。總之,不論是以上哪種結合方式,這對于用戶來講都是一種前所未有的革新體驗。
未來,使用無人機的企業會更多,而且很多企業可能擁有不止一架無人機,這酒會涉及到無人機的軌跡管理問題。企業需要通過應用設定管理多架無人機的航線,在這之中就需要結合LBS的能力才能實現。很多飛行作業一般都是外場操作人員將飛行器帶出去,然后由中心指揮人員繪制好飛行軌跡,同時管理這些飛行器的路徑。而他們完全可以將飛行軌跡上傳至云圖,然后下載傳輸至飛行器中,由飛行器自動完成一些飛行作業。
本屆高德LBS智能硬件編程馬拉松是“2014高德LBS應用大賽”的一個環節,參與智能硬件編程馬拉松的作品也可同時報名參與LBS應用大賽,與更多團隊角逐價值328萬的最終大獎。
程序員人生,我編程,我富裕,記住wfuyu網,php教程,php學習,php手冊,CMS模版制作
聲明:本站大部分內容是作者原創,少部分收集于互聯網供大家一起學習,原版權很多不明,如有侵權請聯系本站,謝謝!
粵ICP備14040726號-1?? 2015-2020 程序員人生 版權所有


